

Nice work Roel! Nice work Roel! Hi guys I still had to fix my flight plan issue which was not being able to plot lines between the waypoints. Here for my MFD LUA code in Air manager needed to be changed from a native method using built in maps, to a vector map coding. This wasn't that hard after all, with help of chatgpt, but showing navaids and airports was. This was more due to how Airmanager works; LUA is a script language this means all code is sequential. But... in the end I solved all issues and MFD is operational. Here a short video https://youtube.com/shorts/Jmm3lkvbK8c?feature=share One thing I deviate from actual MFD is that my range is not from determined steps but continuously adjusts Hi guys I still had to fix my flight plan issue which was not being able to plot lines between the waypoints. Here for my MFD LUA code in Air manager needed to be changed from a native method using built in maps, to a vector map coding. This wasn't that hard after all, with help of chatgpt, but showing navaids and airports was. This was more due to how Airmanager works; LUA is a script language this means all code is sequential. But... in the end I solved all issues and MFD is operational. Here a short video One thing I deviate from actual MFD is that my range is not from determined steps but continuously adjusts Nice work Roel! I know this has been one of your biggest hangups and you have now found a solution to the problem. Looks smooth and responsive. Great work! What do you have planned next on your "to do list"? Nice work Roel! I know this has been one of your biggest hangups and you have now found a solution to the problem. Looks smooth and responsive. Great work! What do you have planned next on your "to do list"? Thanks Ron Still have to finish the FO chair , and add some functionallity in my FMS, like holding patterns. Thanks Ron Still have to finish the FO chair , and add some functionallity in my FMS, like holding patterns. Nice work Roel! I enjoy seeing the updates to your build. Nice work Roel! I enjoy seeing the updates to your build. Hi all I have been working on mechanical standby instruments. This is my prototype as designed in Fusion 360: And here is a short video of it in action: https://youtu.be/qsRnuDaa4eg But there are issues. I still haven't solved this. But never the less i wanted to share this work in progress... Hi all I have been working on mechanical standby instruments. This is my prototype as designed in Fusion 360: And here is a short video of it in action: But there are issues. I still haven't solved this. But never the less i wanted to share this work in progress... Hey Roel, I know this is still a work in progress but it's very impressive what you have so far! Thank you for taking this project on. Several of us would love to have mechanical gauges working in our sims at some point in the future. Do you have any kind of feedback sensors that can reset the gauge back to straight and level flight? If you are only seeing these issues after doing rolls and loops, it would not be a bad idea to include feedback sensors. The good news is we are not modeling a fighter jet. In other words, 99.999% of our flight time will be spent in a flight envelope, no more than 50 degrees roll left or right and 40 degrees of pitch up or down. If what you have working can maintain proper attitude within this box, I would say you are very close. Please keep up posted on this progress! Hey Roel, I know this is still a work in progress but it's very impressive what you have so far! Thank you for taking this project on. Several of us would love to have mechanical gauges working in our sims at some point in the future. Do you have any kind of feedback sensors that can reset the gauge back to straight and level flight? If you are only seeing these issues after doing rolls and loops, it would not be a bad idea to include feedback sensors. The good news is we are not modeling a fighter jet. In other words, 99.999% of our flight time will be spent in a flight envelope, no more than 50 degrees roll left or right and 40 degrees of pitch up or down. If what you have working can maintain proper attitude within this box, I would say you are very close. Please keep up posted on this progress! Hi Ron well, in fact that was also my idea! that would be an option if all fails. to be continued…. Hi Ron well, in fact that was also my idea! that would be an option if all fails. to be continued…. There seem to be issues with steppers and Airmanager. So i returned to Mobiflight. See the result https://youtu.be/xPwvKTBRaeM After weird manouvres the HSI still is accurate to its position. I am going to contact the AM friends for this, but is seems for this Mobiflight is a better choice. There seem to be issues with steppers and Airmanager. So i returned to Mobiflight. See the result After weird manouvres the HSI still is accurate to its position. I am going to contact the AM friends for this, but is seems for this Mobiflight is a better choice. Hey Roel, Great work! This is really impressive seeing your prototype attitude gauge working properly. Looks really cool! Strange that this is not able to work in AM for you. I bet if you show them your video of it working using Mobiflight, they will want to address this and either fix it or show you what you are doing wrong. Things like this are frustrating because sometimes the reason why you can't get something to work properly might be because the software is flawed in some sort of way and unfortunately, you have no idea it's the software until you put countless hours of time and effort into trouble shooting the issues especially when you might be the only one out there trying something new and or different. Thankfully you have a knowledge base using Mobiflight and you were able to get the gauge working properly proving there is nothing wrong with your prototype hardware. Hopefully the guys over at AM will take a look at this and at the very least make it easier for users to interface with if not correcting the issues with it. Again, great work Roel and thank you for spearheading the mechanical standbys! Hey Roel, Great work! This is really impressive seeing your prototype attitude gauge working properly. Looks really cool! Strange that this is not able to work in AM for you. I bet if you show them your video of it working using Mobiflight, they will want to address this and either fix it or show you what you are doing wrong. Things like this are frustrating because sometimes the reason why you can't get something to work properly might be because the software is flawed in some sort of way and unfortunately, you have no idea it's the software until you put countless hours of time and effort into trouble shooting the issues especially when you might be the only one out there trying something new and or different. Thankfully you have a knowledge base using Mobiflight and you were able to get the gauge working properly proving there is nothing wrong with your prototype hardware. Hopefully the guys over at AM will take a look at this and at the very least make it easier for users to interface with if not correcting the issues with it. Again, great work Roel and thank you for spearheading the mechanical standbys!Roel's Learjet 45 simulator
![]()
![]()
Well , I managed to do so!
I made AM crash or navaids didn't show. Also transferring the flight plan from FMS to the MFD caused me some headache.
This is just because I like that .:)
Well , I managed to do so!
I made AM crash or navaids didn't show. Also transferring the flight plan from FMS to the MFD caused me some headache.
This is just because I like that .:)![]()
![]()
And i want to start expirimenting with mixed reality VR soon
And i want to start expirimenting with mixed reality VR soon![]()
![]()
My first prototype is the HSI .
I am still not sure how i will mount it in my actual MIP, but that will be for later.
All is 3D printed and uses 2 stepper (8BYJ-48 stepper with ULN2003 driver)
For interfacing i use the Airmanager again.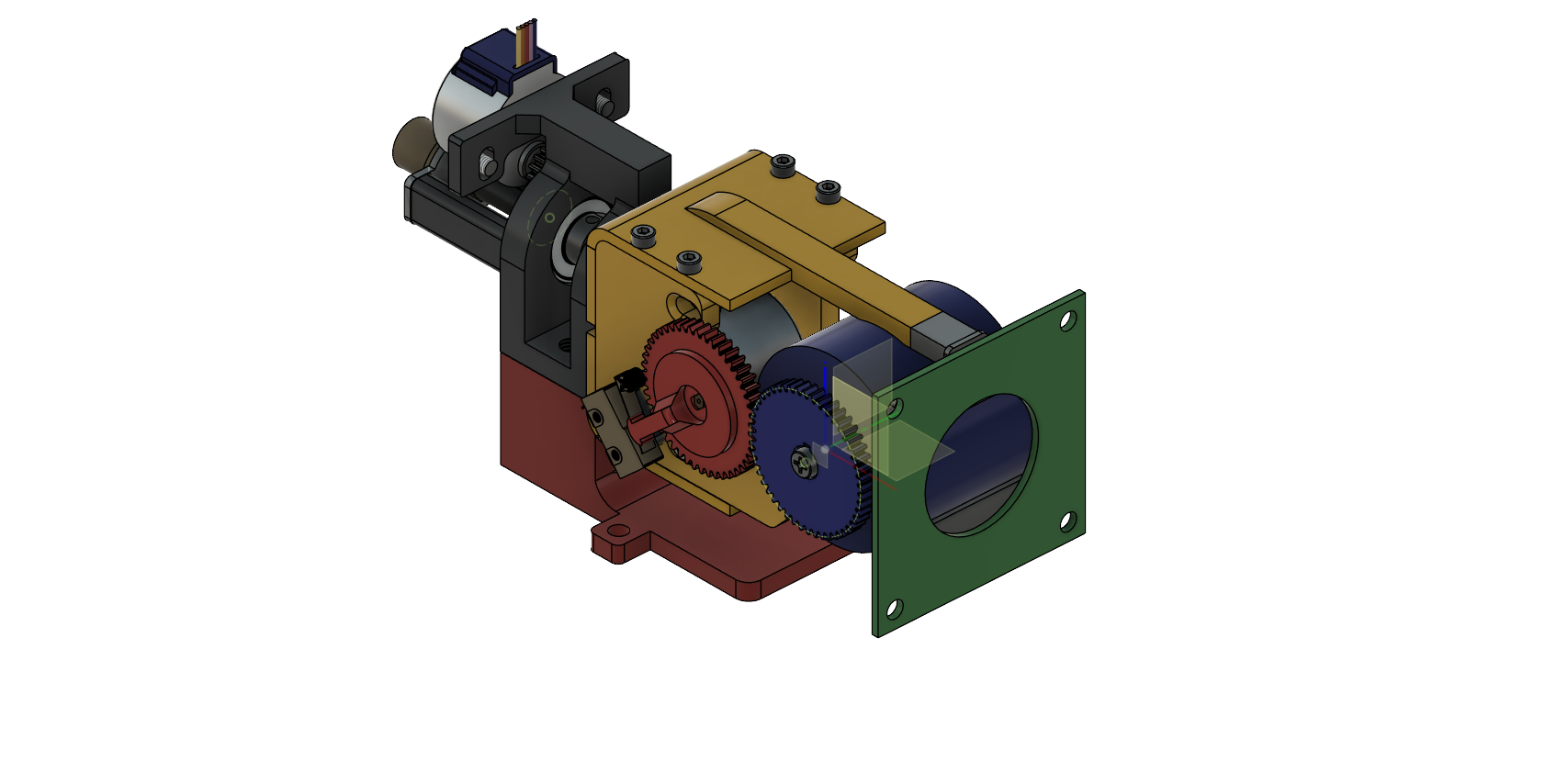
All works ok, but sometimes the HSI is not showing the actual situation.
Espescially after a roll or looping or so.
You can see this in the video.
It seems to be related to the speed when doing manouvres like rolls etc.
I see there is a lot of data received from the sim which should result in movement of the steppers.
Maybe the driver board gets overloaded or something.
My first prototype is the HSI .
I am still not sure how i will mount it in my actual MIP, but that will be for later.
All is 3D printed and uses 2 stepper (8BYJ-48 stepper with ULN2003 driver)
For interfacing i use the Airmanager again.
All works ok, but sometimes the HSI is not showing the actual situation.
Espescially after a roll or looping or so.
You can see this in the video.
It seems to be related to the speed when doing manouvres like rolls etc.
I see there is a lot of data received from the sim which should result in movement of the steppers.
Maybe the driver board gets overloaded or something.![]()
![]()
i have a “reset” switch in place, it does a new calibration when in flight.
but it should not be nessecary…
i have a “reset” switch in place, it does a new calibration when in flight.
but it should not be nessecary…![]()
I have tried to fix the issue after doing some aerobatics with the Lear45 🙂 and the HSI getting offset , but no luck so far.
This does work just fine when testing the movement setting the stepper to certain angles hardcoded in AM.
But it gets disturbed when getting data from the Sim.
My thinking is it gets flooded when doing a loop for instance.
This seems to be much better for use with steppers.
For instance ;
I have tried to fix the issue after doing some aerobatics with the Lear45 🙂 and the HSI getting offset , but no luck so far.
This does work just fine when testing the movement setting the stepper to certain angles hardcoded in AM.
But it gets disturbed when getting data from the Sim.
My thinking is it gets flooded when doing a loop for instance.
This seems to be much better for use with steppers.
For instance ;
![]()
Roel's Learjet 45 simulator
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()